-
 202408.02查看详情
202408.02查看详情Qinfeng,China's Hidden Champion in Stamping Robot
Professional Stamping Robot and Stamping Automation Solution Provider -
 202407.24查看详情
202407.24查看详情沁峰机器人为中专毕业生铺设高端制造职业道路,激发县城青年的科技兴国梦
随着企业的持续壮大,我们期望创造更多就业岗位,让县城青年参与到高端制造业的实践中,点燃他们的科技兴国梦 -
 202407.11查看详情
202407.11查看详情客户案例|效益效率双飞跃,沁峰自动化技术革新汽车零配件制造
沁峰提供的冲压自动化解决方案不仅为浙江某汽车零配件制造公司带来了生产效率和产品质量的双重飞跃,也为汽车零配件生产行业提供了一条清晰的转型升级之路。 -
 202407.02查看详情
202407.02查看详情行业资讯|智能制造是什么——五大特征、八大模式、十大技术
智能制造是一种由智能机器和人类专家共同组成的人机一体化智能系统,它在制造过程中能进行智能活动,诸如分析、推理、判断、构思和决策等。通过人类与智能机器之间的协作共事来拓展,延伸并部分替代人类专家制造时的 -
 202407.02查看详情
202407.02查看详情媒体报道|湖南华容:传统农业县踏上机器人新赛道
湖南沁峰机器人有限公司厂房内,整齐排列的摆臂式冲压机器人、四关节机器人、三合一送料机等整装待发。 -
 202406.20查看详情
202406.20查看详情行业资讯|工业机器人如何精准选型?这9大参数告诉你!
在自动化行业,选择合适的“机器人”对于那些第一次准备接触的设计人员或工厂来说,也许会有些迷茫。下面,我们从9个专业的参数方面,来告诉你如何选择一个合适的工业机器人。 -
 202406.14查看详情
202406.14查看详情媒体探访|从国内领先到国际竞争,沁峰冲压机器人的崛起之路
冲压机器人是冲压行业的特种兵,作为生产工具,安全、稳定、精准、高效,是冲压机器人身上的必备标签。在该领域为国家担负起追赶世界先进水平重任的企业,是位于湖南省岳阳市华容县的湖南沁峰机器人。 -
 202406.14查看详情
202406.14查看详情媒体探访|沁峰机器人的速度与激情,每分钟25次节拍刷新行业纪录
岳阳广电记者深入湖南沁峰机器人生产车间,亲眼见证了汽车零配件代加工生产线的高效能。在这里,沁峰机器人正以惊人的速度工作,在短短1分钟内生产出10多个精密零件。 -
 202406.14查看详情
202406.14查看详情头条|沁峰集团推出全面自动化冲压解决方案,助力制造业客户实现增效降本
沁峰集团凭借其持续的科技创新,为汽配、家电、新能源、机电等多个行业提供了高效、精确的自动化冲压解决方案,助力客户在变革中抢占先机。 -
 202406.07查看详情
202406.07查看详情员工故事|技术创新重塑生产安全,从冲压工到机械臂制造
传统的冲压工作,冲压技工面对的是每秒数次的快速冲压,稍有不慎就可能引发严重的工伤事故。在这样的背景下,沁峰机器人通过技术创新来重塑五金冲压生产安全标准,研发出冲压机械臂。 -
 202406.07查看详情
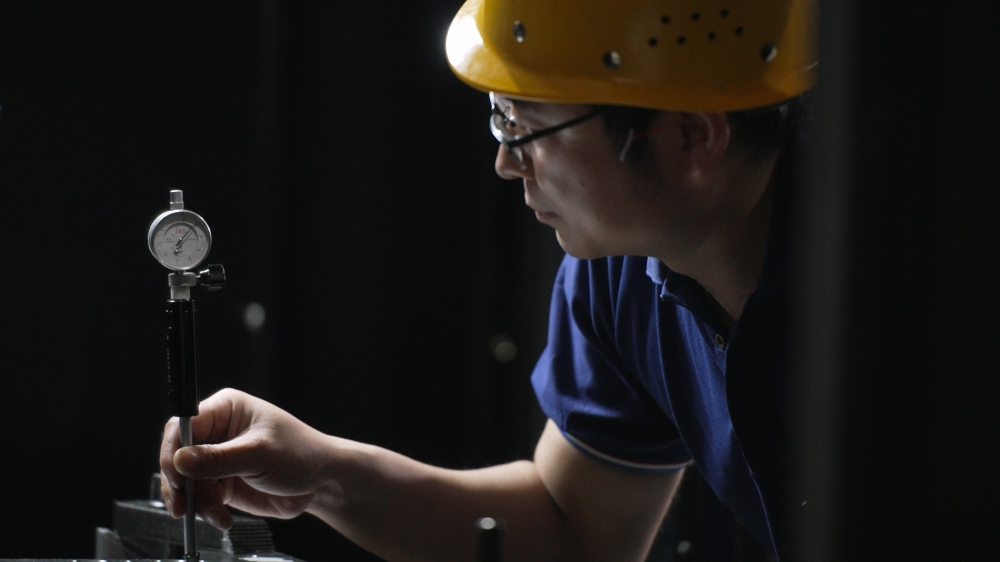
202406.07查看详情媒体探访|沁峰冲压机器人为工业制造注入“新质生产力”
机器人广泛应用于华容制造产业随着全球科技革命和产业变革的加速推进,机器人产业正步入技术创新密集活跃、应用深度拓展的发展机遇期。近年来,华容县加快构建先进装备制造产业链条,科学布局机器人产业 -
 202406.07查看详情
202406.07查看详情头条|沁峰如何成为工业机器人细分赛道国家专精特新小巨人
沁峰如何成为工业机器人细分赛道国家专精特新小巨人